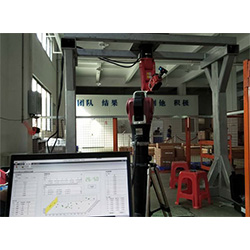
RCS3000机器人校准与性能测试系统,主要由激光跟踪仪测量系统和配套专用软件组成,通过对工业机器人运行过程中多种位姿精度的精确测量和计算完成对机器人D-H 参数、减速比、耦合比、TCP点、Home点等核心参数校准,有效提升机器人定位精度5-10 倍,并能覆盖GB/T12642-2013/ISO9283-1998标准规定的全部14 项性能指标测试,一键生成完整的图文测试报告。 采用RCS3000机器人校准与性能测试系统,可以用最小的代价弥补工业机器人本体的各种因素导致的变形及误差,提升工业机器人的绝对定位精度,而不需要更改工业机器人的机械部件。 RCS3000机器人校准与性能测试系统已经在埃斯顿、配天等多个机器人厂家应用。
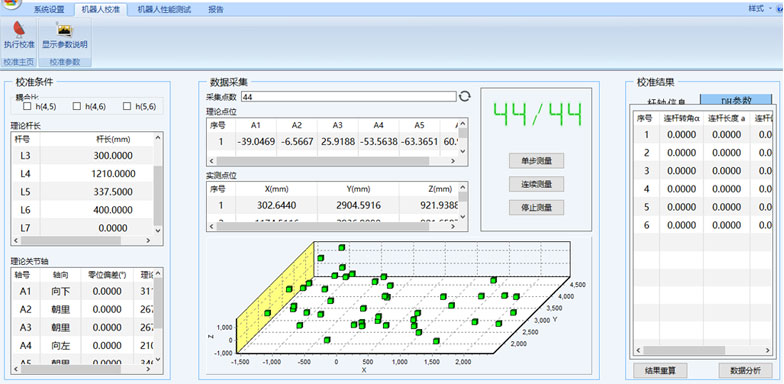
机器人校准系统功能特点 1. 配套激光跟踪仪,采集精度达到15微米; 2. 可完成对串联关节机器人、SCARA机器人、DELTA机器人等全系列机器人D-H 参数、减速比、耦合比等核心参数校准; 3. 有效提升机器人定位精度5-10倍; 4. 一键生成完整的图文测试报告; 5. 校准过程操作简单,效率高。
校准步骤 1. 硬件连接:连接好激光跟踪仪的电源,以及和电脑的连接,启动机器人; 2. 安装工装:将工装安装好,并放置好靶球; 3. 测量:机器人编写好程序,走50个点;同时启动校准程序,输入理论参数,进行测量; 4. 校准:在机器人控制器中输入校准参数,完成校准。
机器人性能测试系统功能特点 可完成GB/T12642-2013/ISO9283-1998标准规定的全部14项性能指标测试。
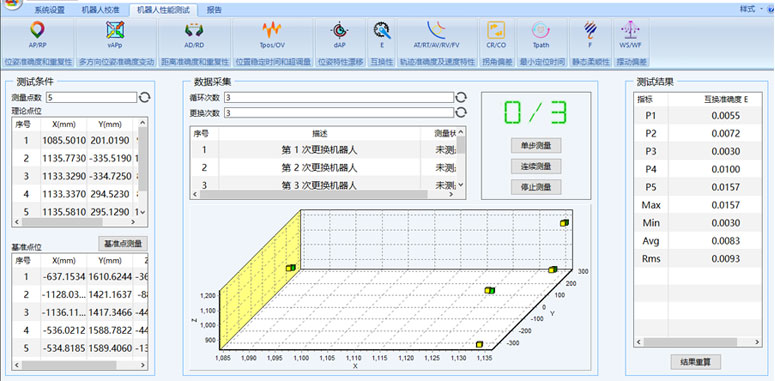
| 静态性能测试 | 动态性能测试 | 序号 | 项目 | 项目 | 1 | 位置稳定时间 | 位置稳定时间 | 2 | 位置超调量 | 位置超调量 | 3 | 轨迹准确度和重复性 | 轨迹准确度和重复性 | 4 | 重定向轨迹准确度 | 重定向轨迹准确度 | 5 | 拐角偏差 | 拐角偏差 | 6 | 轨迹速度特性 | 轨迹速度特性 | 7 | 最小定位时间 | 最小定位时间 | 8 | 摆动偏差 | 摆动偏差 | 9 | 位姿准确度和位姿重复性 | / | 10 | 多方向位姿准确度变动 | / | 11 | 距离准确度和距离重复性 | / | 12 | 位姿特性漂移 | / | 13 | 互换性 | / | 14 | 静态柔顺性 | / |
应用范围 1. 机器人样机开发; 2. 机器人定型检测; 3. 机器人出厂验收; 4. 学校机器人专业课程培训; 5. 提供机器人校准与性能测试技术服务; 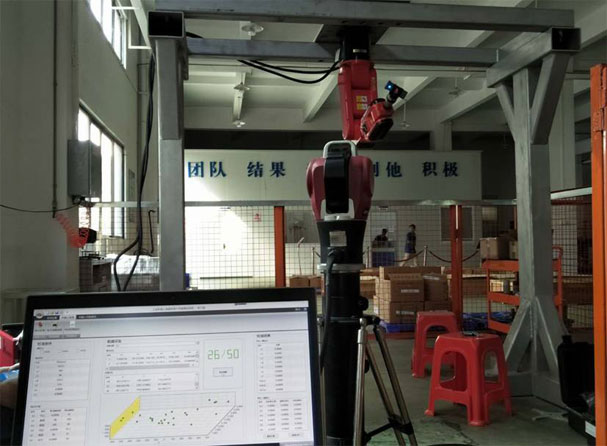

|