|
MCDC505全数字直流伺服驱动器
一、 概述
MCDC505是本公司采用DSP控制技术设计生产的低成本全闭环全数字直流伺服驱动器。包括三个闭环调节回路(位置回路、速度回路以及电流回路)。可以工作在位置,速度和转矩模式,:适合驱动电压50V 功率在200W以下的直流伺服电机。
二、 特点
l 位置控制:输入光隔离脉冲与方向(PULSE/DIR)
l 速度控制::输入为模拟0V~+3.3V电压信号(由Pos.ff做速度输入)
l 转矩控制::输入为模拟0V~+3.3V电压信号((由Pos.ff做转矩输入)
l 电流环带宽:(-3dB)2KHz(典型值)
l 速度环带宽:500Hz(典型值)
l 位置环带宽:200Hz(典型值)
l 过流,I2T,过压,欠压,过热,超速,超差保护
l 绿灯表示运行,红灯表示保护
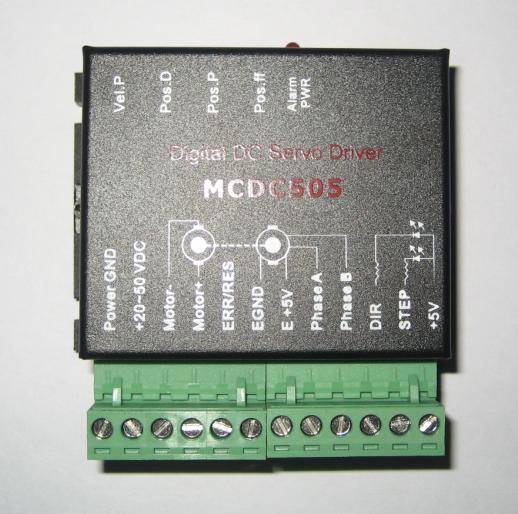
三、 端口说明
|
端子号 |
符 号 |
说明 |
端子号 |
符 号 |
说 明 |
|
1 |
Power GND |
电源地 |
7 |
E +5V |
编码器电源正极 |
|
2 |
+20~50VDC |
电源正极 |
8 |
Phase A |
编码器A相 |
|
3 |
Motor- |
电机红线 |
9 |
Phase B |
编码器B相 |
|
4 |
Motor+ |
电机黑线 |
10 |
DIR |
方向 |
|
5 |
ERR/RES |
误差报警/复位 |
11 |
STEP |
脉冲 |
|
6 |
EGND |
编码器电源地 |
12 |
+5V |
控制信号电源 |
四、 伺服系统的参数调整和设置(电位器逆时针调时值减小,顺时针调时值增大)
A :驱动器电路板上一个四位的双排插针,做工作模式设置,从外到里定义为1-4号位置。
1)当短接帽插都不插时,位置模式脉冲/方向。
2)插在1号位置时,速度控制,由Pos.ff做速度输入。
3)插在2号位置时,力距控制,由Pos.ff做转矩输入。
4)插在1号和2号位置时,位置控制正脉冲/负脉冲输入。
5)插在3号位置时,位置控制脉冲/方向,但转动方向相反。
B :电位器有11个刻度,逆时针调到头为0,顺时针调到头为10,中间为5
Pos.ff:位置前馈调节
Pos.P :位置比例增益调节
Pos.D :位置微分调节
Vel.P :速度比例增益调节
伺服系统包括三个反馈回路(位置回路、速度回路以及转矩(电流)回路)。最内环电流回路的反应速度最快,中间环节速度的反应速度必须高于最外环位置回路。假使未遵守此原则,将会造成震动或反应不良。伺服驱动器的设计可确保电流回路具备良好的反应效能。用户只需调整位置回路与速度回路参数。系统各参数之间总是相互制约的,如果只有位置回路增益增加,位置回路输出的指令可能会变得不稳定,以致整个伺服系统的反应可能会变得不稳定。通常可参照下列步骤对系统进行调整:
1) 将位置前馈和位置微分设为电位器刻度(3),位置增益和速度增益先设在较低值刻度(3),然后在不产生异常响声和振动的前提下,逐渐增加速度增益至少有振动则再减小刻度(0.5-1) 格。
2) 增加位置增益至少有振动。再增加位置微分至没有振动。
3) 增加位置前馈使滞后和超调最小。
4) 如果电机运行时有振动,适当减少速度增益。
5) 如果电机停止时有振动,适当减少位置增益,或增加位置微分。
在整个响应无超调、无振动的前提下,应将位置增益设至最大。随后对速度增益及位置前馈、位置微分进行微调,找到最佳值。
五、 技术指标
| //
|